
机器人并不都是“旱鸭子”,作为彰显海洋特色的现代化城市和国际科技创新中心重要承载地,广州的众多涉海科研机构一直专注于研发各类水下机器人,用于海洋调查、能源开采、海底考古等诸多领域。
近年来,广州大学刘爱荣教授团队研发了专门用于检测桥梁、大坝等涉水结构的水下结构检测机器人。这款机器人有何特色?本期《科技周刊》,记者采访刘爱荣团队,解码其研发的“水下桥梁检测工程师”。
水下结构检测机器人的视觉模块犹如一只有智慧的“大眼睛”。
为什么要研发“大眼仔”?
解决桥梁检测水压大、看不清等难题
广州大学风工程与工程振动研究中心主任刘爱荣告诉记者,由于桥梁大坝等水下结构看不到、摸不着,作业风险高,一直是检测的痛点。“以往水下结构的检测主要靠潜水员水下摸桩,但潜水员并不是专业的工程师,对“病害”认知不是很清晰;如果水体较深,潜水员则无法下潜到指定位置;如果水体浑浊,潜水员也会因为看不清而无法完成既定的检测任务。”
从2017年起,团队启动了自主研发水下机器人来代替潜水员完成桥梁水下结构检测工作。2019年,团队制作出水下检测机器人初代样机。后来,越来越多学科背景的成员加入研发团队,不断提升各项性能指标。近日,该团队的第五代水下检测机器人正式发布,抗扰流能力得到极大提升,能够在急流下顺利完成水下结构检测工作。不仅如此,水下检测机器人还练就了另一大本领——浑水检测。
刘爱荣自豪地说,通过研发水下检测机器人,团队已获授权了50余项相关专利,“我们的机器人具有较强的优势,团队自主研发了水下结构“病害”图像增强算法和智能识别算法,并可搭载机械臂、回弹仪、声呐、超声波探头、取水器等装置,同时还具备非接触检测和接触检测的功能。”
“大眼仔”已为多座广州桥梁做检测
刘爱荣团队非常重视水下机器人的成果转化与应用示范。团队高级实验师陈炳聪介绍,早在2023年,团队所拥有的国家发明专利“变体积辅助驱动水下机器人及控制方法”就已获得大湾区高价值专利培育布局大赛银奖。目前,该专利已授权给广州广检建设工程检测中心有限公司等3家企业,并已开展规模化应用。
刘爱荣介绍,团队研发的水下机器人在桥梁、大坝、泵房、管道等涉水结构的检测中发挥了重要作用,代表性工程有广州珠江高等级航道桥——广州大桥、珠江大桥、海珠桥、江湾大桥等,湖南娄底20余座铁路桥的水下桥墩桩基,广西大藤峡水利枢纽等。

机器人的水下视野
水下机器人硬核技能
“浑水摸缝”
能清晰辨别桥墩表面0.2mm的裂缝
浑水检测如何实现?陈炳聪告诉记者,在滨海地区或河流出海口,泥沙和水生生物比较多,尽管水下机器人配备有高清摄像头和照明设备,但依然无法在浑水下获取清晰的数据图像。为解决这个难题,团队在机器人软硬件方面作了升级。
“浑水场景检测是市面上其他水下机器人不太考虑的场景,却是我们在水下结构检测方面必须攻克的难关。通过大量实验,我们研发了浑水滤镜,并通过光学、声学两种方法多模态收集水下结构的各种“病害”,利用自研的算法进行声光数据的融合和整体成像,从而实现了高清晰度的水下结构检测。”陈炳聪透露,经过性能升级,团队研发的水下机器人已能在水体浑浊度50NTU单位的情况下,清晰辨别桥墩表面0.2mm的裂缝,与清水状态下检测的效果一致。这是团队成员交叉融合了物理、机电、计算机等学科知识,联合攻关,才最终攻克的难题。
“急流立定”
8个螺旋桨推进器自主调整 可在2米/秒水流下保持稳定
抗扰流能力强是该水下机器人的另一大特点。
团队骨干成员梁家乔介绍,自然河流水流速度较快,水下机器人要实现对水下结构的检测,其稳定作业能力至关重要。最初,为实现水下机器人在扰流中的姿态稳定,他和其他几位团队成员在刘爱荣的指导下,对机器人的外部结构和控制算法进行了优化。“我们对机器人的结构、流体力学特性以及控制算法乃至各个细节都进行了升级。刚刚发布的第五代水下机器人抗扰流能力从初代机的0.5~0.7m/s提升到2m/s,足以应对大多数河流。”此外,该水下机器人共配有8个螺旋桨推进器,机器人能自动感受水下扰流的流速、流向,通过相关算法主动消减水流的影响,保持其在水中姿态的稳定。
“病害”百科
深度学习“病害”图像 模型检测准确率超95%
刘爱荣告诉记者,利用水下机器人所搭载的科学仪器以及后台算法,可针对桥梁大坝等水下结构开展两类检测:一是非接触检测,即通过机器视觉检测水下结构表观缺陷,如混凝土的开裂、剥落、漏筋、钢筋锈蚀、河水对桥墩的冲刷淤积等。二是接触式检测,利用机器人搭载超声波探头、回弹仪、钢筋扫描仪等设备,通过接触水下结构的表面获取混凝土的强度、钢筋的分布、内部空鼓等数据。
刘爱荣介绍,水下机器人通过深度学习大量水下结构“病害”图像,可以自动识别“病害”,“我们的水下机器人对裂缝等‘病害’的识别度非常高。我们建立了大量的‘病害’数据库,进行了人工标注,这让我们的模型得到非常全面的训练,如今水下裂缝识别准确率可达到95%以上,未来,模型通过进一步训练,准确率还将进一步提升。”
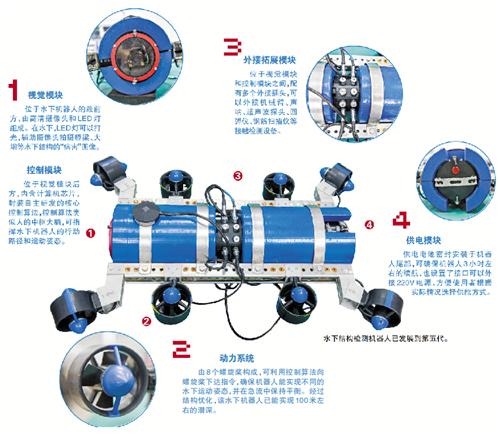
视觉模块
位于水下机器人的最前方,由高清摄像头和LED灯组成。在水下,LED灯可以打光,辅助摄像头拍摄桥梁、大坝等水下结构的“病害”图像。
控制模块
位于视觉模块后方,内含计算机芯片,封装自主研发的核心控制算法,控制算法类似人的中枢大脑,可指挥水下机器人的行动路径和运动姿态。
动力系统
由8个螺旋桨构成,可利用控制算法向螺旋桨下达指令,确保机器人能实现不同的水下运动姿态,并在急流中保持平衡。经过结构优化,该水下机器人已能实现100米左右的潜深。
外接拓展模块
位于视觉模块和控制模块之间,配有多个外接插头,可以外接机械臂、声呐、超声波探头、回弹仪、钢筋扫描仪等接触检测设备。
供电模块
供电电池密封安装于机器人尾部,可确保机器人3小时左右的续航,也设置了接口可以外接220V电源,方便使用者根据实际情况选择供能方式。
广州水下机器人能耐大
不仅是广州大学,在广州这座彰显海洋特色的现代化城市内,众多科技企业和科研院所都在研发、销售各种用途的水下机器人。
履带式海底管缆埋设机器人“金牛座”:在南沙深海智人(广州)技术有限公司,记者见到了亚洲最大的履带式海底管缆埋设机器人“金牛座”。去年,“金牛座”圆满完成3个海底电缆铺设和维修项目。该水下机器人就像一艘海底的“小坦克”,依靠履带边前行边埋缆,平均埋缆速度为350米/小时~500米/小时,最高可达750米/小时。相比传统的拖曳式管缆埋设机器人,“金牛座”的作业效率至少提升了两倍,让我国海底管缆埋设技术达到国际顶尖水平。
水下作业机器人“穿越-A300”:2022年北京冬奥会上,一段“水下火炬传递”的环节备受大家关注,火炬在水下燃烧,机器人能自主完成火炬对接,这正是广东智能无人系统研究院(南沙)的“硬科技”。2023年,该院又成功研制了“穿越-A300”水下机器人。该机器人可在水下狭窄环境开展作业,适用于水务测绘、水下应急救援等工作。该设备已在国家重大水利工程“珠江三角洲水资源配置工程”中进行了测绘检测工作,并在南沙港区边防检查中成功实现了对重点部位的精准定位。
水下清淤机器人:在城市,泵站、渠箱等排水设施清淤养护工作已成为水生态环境治理的痛点难点之一。为此,广州市城市排水有限公司自2021年开始,利用两年半的时间,研发出水下清淤机器人,该机器人采用机电液技术,将集料、泵送、行走、水下感知等控制单元融为一体,搭载可视化智能操作系统,具备远程控制机器人运动,实时查看机器人工作场景、设备运行状态、水下定位导航、识别障碍物等功能,目前已成功应用于广州市中心城区的泵站、渠箱、深隧。
大院大所谈创新
两栖检测机器人正在研发中
刘爱荣所在的广州大学风工程与工程振动研究中心自2008年成立以来,取得了一系列科研成果。中心拥有多个高水平科研平台,包括工程结构抗风与结构安全国家国际科技合作基地、土木工程新型复合材料与复合结构学科创新引智基地、广东省工程结构抗风与健康监测工程技术研究开发中心等,主要研究高层建筑、大跨度屋盖结构、桥梁等在强风作用下的风效应、风致振动及其控制技术;开展桥梁抗震性能研究、新型高性能桥梁设计、桥梁智慧检测等。
目前,针对桥梁的智慧检测,刘爱荣团队正在研究将水下检测机器人升级为水陆两栖检测机器人。在团队实验室,记者看到了该机器人研发的阶段性成果。
“我们计划在机器人上安装吸盘或旋翼,当它离开水面后,可以像无人机一样飞行并抵达指定位置,进而继续进行桥梁的其他部分检测。”刘爱荣介绍,有了水陆两栖桥梁巡检机器人,就可以实现一机多用,开展水陆一体化检测,大大节省人力物力。
文/广州日报全媒体记者武威
图/广州日报全媒体记者李波


































